在复杂构件激光焊接过程中,通过使用基于机器视觉的焊缝位置跟踪焊接机器人系统可在保证高精度需求同时提高焊接质量与生产效率,因此该系统在现代焊接工业领域中得到广泛运用。为解决焊接效率与精度问题,设计了一套用于焊缝位置跟踪的基于线结构光视觉传感器系统,同时建立了一套传感器软件平台。激光加工国家工程研究中心蓝光线结构传感器软件开发成果如下:
搭建了一套基于450 nm蓝光线激光视觉传感器焊缝位置跟踪系统。完成了线结构光传感系统标定。搭建了相机线性模型以及倾斜相机模型。确立线激光平面标定方案。实验证明标定模型满足焊缝三维信息测量精度要求。
分析了实际采集图像灰度变化问题。提出一套自适应曝光参数调节方案,在全局亮度均值曝光估计方案基础上设计了一套动态步长调节系统;研究了实际采集图像局部高亮噪声问题。提出一套图像增强处理方案。
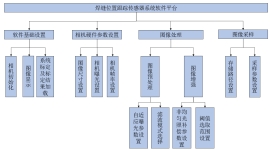
设计了一套传感器系统软件平台。实验证明软件平台与传感器系统适配良好且主体功能可行性较好。